OpenVLA: mô hình nguồn mở 7B tham số đặt ra tiêu chuẩn mới cho chính sách thao tác robot
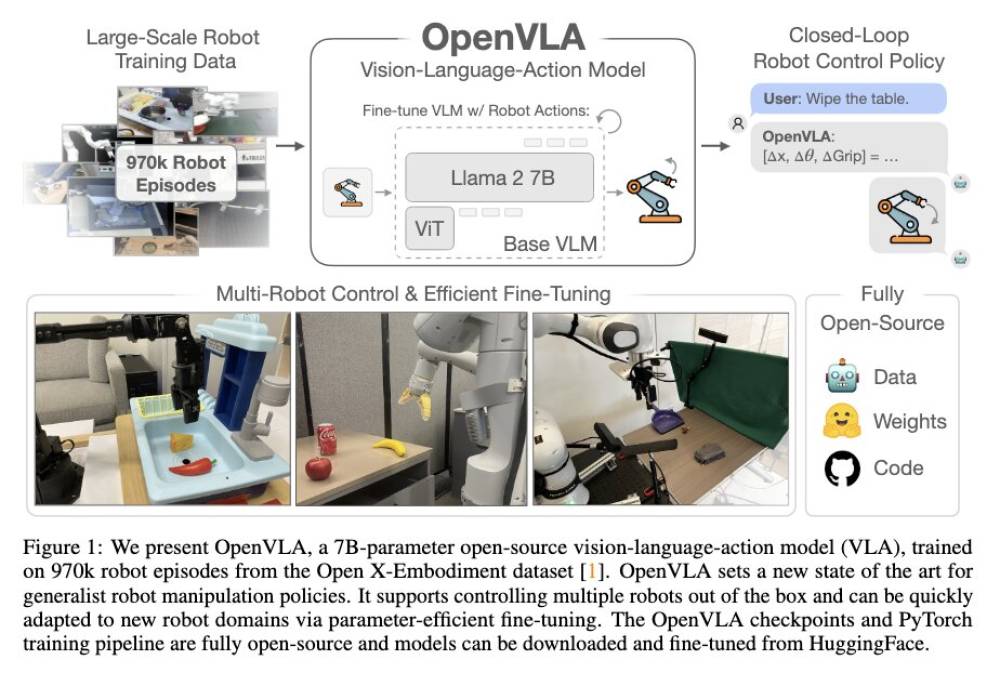
- OpenVLA là một mô hình VLA nguồn mở 7B tham số, đặt ra tiêu chuẩn mới cho các chính sách thao tác robot, do các nhà nghiên cứu từ Stanford, UC Berkeley, Toyota Research Institute, Google Deepmind và MIT đề xuất.
- OpenVLA bao gồm một mô hình ngôn ngữ điều kiện trực quan được tiền huấn luyện, nắm bắt các chi tiết trực quan ở nhiều cấp độ khác nhau. Nó được tinh chỉnh trên tập dữ liệu lớn và đa dạng gồm 970k quỹ đạo thao tác robot từ tập dữ liệu Open-X Embodiment.
- OpenVLA vượt trội hơn mô hình hàng đầu trước đó, RT-2-X 55B tham số, với 16,5% tỷ lệ thành công tuyệt đối trên 29 tác vụ trên nền tảng WidowX và Google Robot.
- Các chính sách OpenVLA hoạt động tốt hơn các chính sách được tiền huấn luyện và tinh chỉnh như Octo. Để huấn luyện OpenVLA, khung VLM Prismatic-7B được tiền huấn luyện để dự đoán các hành động của robot.
- Cả hai phiên bản của Diffusion Policy đều tốt bằng hoặc vượt trội hơn các chính sách tổng quát Octo và OpenVLA cho các tác vụ đơn giản hơn chỉ cần một hướng dẫn. Tuy nhiên, đối với các tác vụ tinh chỉnh phức tạp hơn liên quan đến nhiều đối tượng và cần hướng dẫn ngôn ngữ, các chính sách tổng quát được tiền huấn luyện hoạt động tốt hơn.
- OpenVLA là cách tiếp cận duy nhất đạt tỷ lệ thành công ít nhất 50% trên tất cả các tác vụ được thử nghiệm, khiến nó trở thành một lựa chọn mặc định mạnh mẽ cho các tác vụ học bắt chước, đặc biệt là những tác vụ liên quan đến nhiều hướng dẫn ngôn ngữ khác nhau.
📌 OpenVLA, một mô hình nguồn mở tiên tiến với 7 tỷ tham số, thể hiện hiệu suất vượt trội trong việc điều khiển nhiều loại robot ngay từ đầu. Phương pháp này có thể dễ dàng thích ứng với các thiết lập robot mới thông qua các kỹ thuật tinh chỉnh tham số hiệu quả, đạt tỷ lệ thành công ít nhất 50% trên tất cả các tác vụ được thử nghiệm. Tuy nhiên, OpenVLA hiện chỉ hỗ trợ quan sát hình ảnh đơn lẻ, và cần được mở rộng để hỗ trợ nhiều đầu vào hình ảnh, cảm nhận vị trí và lịch sử quan sát.
https://www.marktechpost.com/2024/06/16/openvla-a-7b-parameter-open-source-vla-setting-new-state-of-the-art-for-robot-manipulation-policies/



Thảo luận
Follow Us
Tin phổ biến
